
A soft lower-extremity robotic exosuit is intended to augment normal muscle function in healthy individuals. Compared to previous exoskeletons, the device is ultra-lightweight, resulting in low mechanical impedance and inertia. 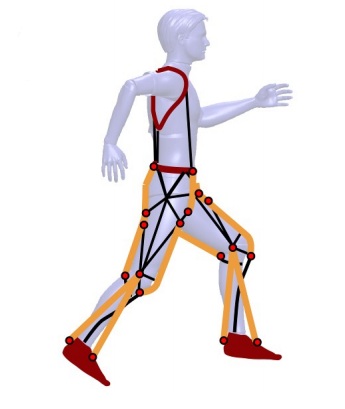 The exosuit has custom McKibben style pneumatic actuators that can assist the hip, knee and ankle. The actuators attach to the exosuit through a network of soft, inextensible webbing triangulated to attachment points utilizing a novel approach we call the virtual anchor technique. This approach is designed to transfer forces to locations on the body that can best accept load. Pneumatic actuation was chosen for this initial prototype because the McKibben actuators are soft and can be easily driven by an off-board compressor.
The exosuit has custom McKibben style pneumatic actuators that can assist the hip, knee and ankle. The actuators attach to the exosuit through a network of soft, inextensible webbing triangulated to attachment points utilizing a novel approach we call the virtual anchor technique. This approach is designed to transfer forces to locations on the body that can best accept load. Pneumatic actuation was chosen for this initial prototype because the McKibben actuators are soft and can be easily driven by an off-board compressor.
The exosuit itself (human interface and actuators) had a mass of 3500 g and with peripherals (excluding air supply) is 7144 g. This preliminary work demonstrates that the exosuit can comfortably transmit joint torques to the user while not restricting mobility and that with further optimization, has the potential to reduce the wearer’s metabolic cost during walking.
Learn more: http://nextbigfuture.com/2014/11/design-principles-of-assistive-soft.html



{kind=link}