
Guido Belforte, Federico Colombo, Terenziano Raparelli, Andrea Trivella, Vladimir Viktorov – Politecnico di Torino –
Methods and devices, developed to improve the static and dynamic performances of pneumatic supports, are here illustrated. Besides good knowledge of the static aspects of a pneumatic bearing, to develop an application it is necessary to complete the study considering the dynamic aspects, too. It is also necessary to solve instability problems (air hammer) and verify the promptness of the active devices that allow improving the performances of passive pads.

Air bearings provide important advantages in comparison with conventional bearings. Thanks to the absence of sliding parts or rolling bodies, we attain reduced friction and wear and the possibility of reaching very high relative speeds among the parts in relative motion. Due to such characteristics, air bearings are used both in high speed applications and in measuring systems (fig. 1), thanks to the motion accuracy that they allow achieving. Air bearings are however characterized by lower rigidity per surface unit compared to rolling bearings and they can also be affected by instability phenomena (the so-called pneumatic hammer). For a good design of an air bearing, it is first of all necessary to know its static characteristics of loading capacity and stiffness. It is therefore mandatory to study also the dynamic aspects to avoid instabilities.
The active control of air bearings allows facing the shortcomings of conventional air bearings, that’s to say passive ones. The control target pursues a double purpose: on one hand the reduction of disturbances on the bearing while maintaining the distance among the parts in motion (the so-called meatus) within a certain desired range of values; on the other hand to compensate the shape errors that are unavoidably generated when supports have big sizes (it is the case of linear guides) and the demanded motion precisions are high.
The methods to make an air pad active are based on the possibility of modifying, during its operation, one or more parameters on which the pad loading capacity depends. It is possible to act on the following factors: the feeding pressure, the average value of the air meatus and the shape of the air meatus.
Control of the feeding pressure
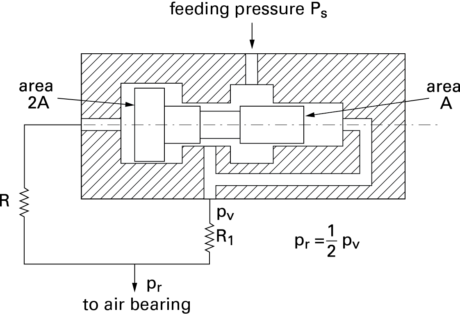
The control of the feeding pressure of an air bearing allows varying the performances of the pad without modifying its geometry. The loading capacity of a bearing is proportional to the average pressure under the bearing; if we increase the feeding pressure, also the mean pressure rises. The regulation of the feeding pressure can then be obtained by means of both pressure regulators that act upstream the pad and through opportune actuators integrated into the pad itself that vary the pad inlet resistance. In the first case the regulators can be either passive systems, provided with internal feedback, or active systems equipped with external sensor and controller. A first important example is the Royle valve, developed in hydraulic applications to obtain a pad with endless rigidity (fig. 2). It is a passive system that allows feeding the pad at a constant pr pressure, irrespective of the meatusunder the pad.
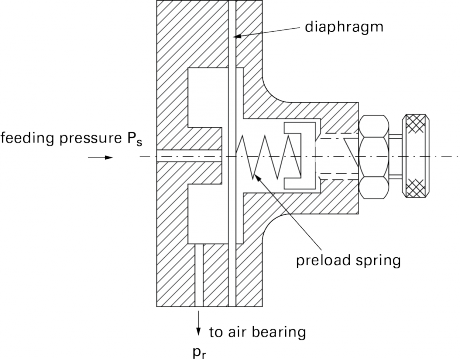
A second example of passive system is the diaphragm valve shown in figure 3. The outlet valve duct is connected with the hydraulic bearing. The valve is characterized by a flow resistance that diminishes when the pr pressure to the pad rises because the diaphragm moves away from the duct thus reducing the resistance at the inlet.
A third example is represented by a system implemented by the Turin Polytechnics for the active control of a pneumatic floating bush with regard to a fixed shaft. The feedback element is a position transducer that reads the bush displacement. The error between the reference value (desired position) and the feedback is processed by a controller of proportional-integrative type that adjusts the pressure values in the upper and lower chambers of the bush. An x displacement of the same towards the bottom corresponds to a pressure increase in the lower chamber and to a decrease in the opposite chamber. This results in a bush with endless rigidity because the control integrator permits the static error zeroing.
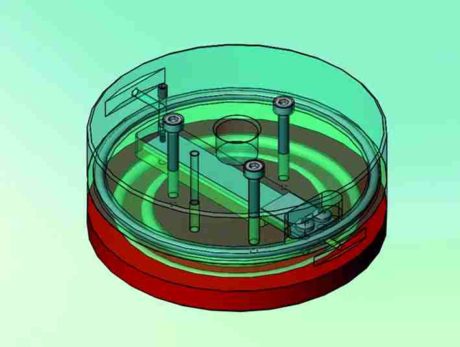
A scheme of a pad with active control, studied by the Politecnico di Torino, is shown in figure 4.
It is a pneumatic pad provided with variable resistance on the feeding. That resistance is implemented by means of a piezoelectric bending plate that modifies the light passage on the feeding.
Control of the mean value of the air meatus
Since the rigidity and the loading capacity of an air pad depend on the entity of the air meatus existing between the pad and the striker plate, it is possible to obtain the desired rigidity by varying the mean value of the meatus during the pad operation. This can be done by modifying the preload on the pad through magnets or by means of the vacuum technology [6]. In the first case (fig. 5) some active magnets, positioned close to the pads, provide an attractive force that counteracts the repulsive one of pneumatic pads, thus determining a variable preload. In the second case, by regulating the depression in chambers positioned close to the pads, we can vary their preload.
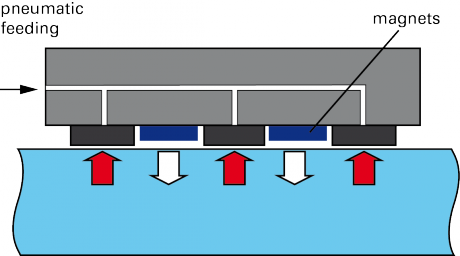
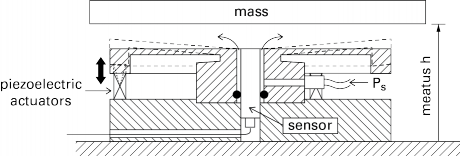
Fig. 6 – Scheme of the pad controlled by piezoelectric actuators developed by the University of Leuven.
Also the shape of the meatus notably influences the loading capacity of the air pad. It is possible to modify that shape with adequate actuators to vary the loading capacity of the pad while operating. In figure 6 it is schematized a prototype developed by theLeuvenUniversity equipped with piezoelectric actuators whose overall passband is around 300 Hz.
Conclusions
We have described the methods that allow making an air bearing active, main component of measuring machines. The choice of the most suitable method for a determinate application depends on several factors, such as the implementation simplicity, the prompt answer and the cost. The pressure control is the most convenient from the economic point of view, even if it is more suitable for static applications. The other two methods permit a regulation with broader band amplitude, against however higher costs.



{kind=link}