
A sort of automation “purity” comes from the use of customizable components, depending on applications. Concerning this, component manufacturers lavish huge efforts to enrich their products with a certain quantity of added-value. The case we are presenting is eloquent indeed.
Today the automation through robots all the flexibility, productivity and reliability needed by users to react proactively to shorter lifecycles, new packaging designs and product variants. Besides, the gripping systems had to adapt, too. The vacuum use is one of the most flexible solutions.
Each robot has obviously different needs: the robots with three grippers, the flexible pickers, real technological spiders, need for instance light, flexible and scarcely cumbersome picking and vacuum generation technologies. Delta robots require instead high speeds and automatic compensations of the heights of the objects to be gripped.
Concerning the vacuum picking and the handling of items in the assembly line, in the manufacturing, packaging, palletizing and depalletizing phases, The Italian company Vuototecnica proposes various possibilities, precisely oriented to the flexibility and lightness of components, small footprint, speed and customization.
Vacuum cylinders
The following case is particularly rich in added-value: a precious example of management of robotic pick&place of chocolate pralines devised for an exacting customer of the company.
They decided to use Vuototecnica vacuum cylinders, for the picking and deposition at very high rate of chocolates inside the packages.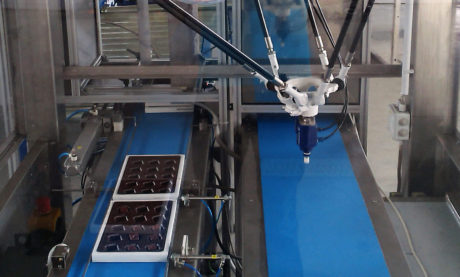

It was possible to centre precisely the preformed package containers, with automatic height compensation, thanks to the stable gripping of vacuum cups, even at a very high speed like the one requested by the customer.
Despite the rate, chocolates are not damaged or compressed and the presence of an anti-rotation rod favours the precision of the positioning into the box.
Cylinders operate by vacuum: they are provided with a front vacuum chamber and a rear chamber at atmospheric pressure. The higher is the pressure difference between the two chambers the higher is the piston thrust and the outgoing stroke of the rod with the vacuum cup.
As soon as the vacuum cup grips the praline, the anti-rotation rod connected with the piston suddenly returns to the initial position, so that the cycle is repeated.
Therefore, creating the vacuum in the front chamber of the cylinder, the rod, integral with the piston, comes out, winning the spring contrast force. The piston is pushed by the atmospheric pressure air that enters the rear chamber of the cylinder, through the drilled rod.
Generally, the return stroke of the rod can occur in two ways: it is possible to prevent the entry of the atmospheric air through the rod hole and, with inserted vacuum, eliminate the pressure differential in the cylinder (in this condition, the forces of the contrast spring and of the atmospheric pressure prevail on the rod itself, which is therefore pushed to its starting position); otherwise, it is possible to exclude the vacuum, restoring the atmospheric pressure in both chambers of the cylinder (also in this case, since there is no more pressure differential, the rod returns to its initial position, pushed by the contrast spring).
The first modality described is the operation principle for which the cylinder has been designed. Assembling, in fact, a vacuum cup on the drilled cylinder rod and creating the vacuum, this will be rapidly moved in contact with the item to be picked, will lift it automatically and will hold it for all the time the vacuum will remain inserted.
The cylinders coupled with vacuum cups are suggested in other applications, too, for instance in the picking and handling of small machined objects, moulded or thermoformed, for the separation of paper and plastic sheets, of veneers, of thin metal sheets and for gripping printed circuits or subtle plastic panels.

They are suitable for short and fast cycles, a single valve is sufficient for the vacuum intercepting to control them and they are easily mounted. Besides, they are manufactured to favour the duration of components in time and easy maintenance. They are in fact made of anodized aluminium with bush for the sliding of the self-lubricating technopolymer rod.
In this specific application, vacuum cylinders have been equipped with Vuototecnica FDA silicone vacuum cups, compliant with the food sector and studied for suiting the surface irregularity of pralines.
Food-grade silicone vacuum cups
At Vuototecnica, the quality of vacuum cups is granted by the severe production regulations and by tests on each component. In the production of each vacuum cup, to make each item recognizable and provided with guaranteed quality certification, according to the compound with which it is manufactured, Vuototecnica marks it with the logo and an identifying alphanumeric code.
Especially in the food industry, where quality standards are more severe, the quality certification is indispensable and utmost care is necessary. Food-grade vacuum cups are generally made of Silicone and they are manufactured according to the regulations that rule the contact with foods, like FDA, BGA and TSCA.
They can be supplied in magnetized version, to be easily identified by metal detectors, in case of failure or slipping from their supports.
Moreover, Vuototecnica can provide the vacuum cup customization, according to the characteristics of the products to be handled and the manufacturing environments.
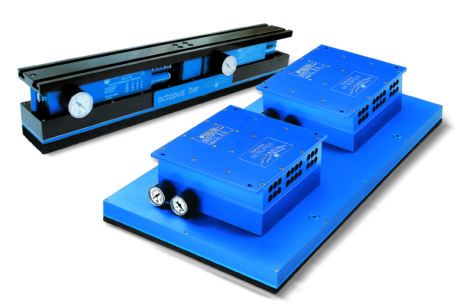
Octopus vacuum gripping system, with customized hands manufactured with 3D printer
For the manufacturers of anthropomorphic robots and palletizing systems, Vuototecnica has implemented Octopus gripping solutions, with the characteristic of gripping objects of any shape and feature, provided that they have not an excessive transpiration, without having to change or to position vacuum cups, even when their surface takes up only 5% of the suction plate.
The operation principle of Octopus gripping systems is based on the vacuum differential generated inside their base casing, when the capacity of the vacuum generator exceeds the quantity of air sucked through the holes of the suction plate.
In their turn, suction plates are based on two different structural principles:
1° – Control and recovery of suction losses through micro-holes
The micro-drilled suction plate uniformly distributes the suction of the pump or of the vacuum generator properly sized, granting a minimum sufficient vacuum degree for lifting the load, even when this takes up only 5% of the plate surface. In the OCTOPUS gripping system with micro-drilled suction plate, the achievable vacuum degree, and therefore the gripping force, is directly proportional to the plate surface taken up: the bigger is in fact the surface covered by the load to be lifted, the higher is the reachable vacuum degree. This principle implies however a higher energy consumption, because it is necessary to provide for a vacuum generator or a pump able to balance the losses of the open micro-holes, up to 90-95 % of their totality, to grant a minimum vacuum differential, sufficient to lift the load with the minor gripping surface.
2° – Exclusion of suction losses through shut-off valves
The shut-off valves equipping the suction plate in this version have the distinctive feature of automatically eliminating the losses of the holes not covered by the load to be lifted, so permitting to concentrate the suction of the vacuum pump or generator on the remaining covered holes. In these gripping systems, the achievable vacuum degree is always the maximum one of the pump or of the generator, it is constant on the entire surface covered by the load to be lifted, no matter whether it is minimum or maximum, and it is affected only by the losses due to porosity or unevenness of the load. This manufacturing principle provides a notable energy saving because shut-off valves eliminate the losses of not gripping holes and allow notably reducing the necessary capacity of the vacuum pump or generator.
Octopus gripping systems are composed by: a grooved aluminium or Polizene® fixing plate, for a fast installation on the automation device and an easy positioning as to the load to be picked; two or three vacuum generators, depending on their size, fed by compressed air; a base box, made of aluminium or polizene®; a micro-drilled aluminium suction plate, coated by a foam rubber or bellow vacuum cups (with shut-off valves as well).
To grant resistance in time, the base box and the fixing plate of the systems are machined from aluminium solid, but to make them even lighter, they can be made of Polizene®, a plastic material that decreases the overall weight by about 40% compared to aluminium ones. The suction plate is made of aluminium, too. The foam rubber coating the suction plates is self-adhesive, easily replaceable, and it is made with a special compound, featuring the suitable density for allowing the grip on uneven or rough surfaces and for maintaining its elasticity even after innumerable cycles. Bellow vacuum cups, thanks to their flexibility, provide the advantage of compensating strong planarity errors and of gripping inclined surfaces as well. They are suggested for picking easily deformable cardboard boxes or product envelopes wound with thermoretractable film. The same bellow vacuum cups are supplied, as standard, in oil-resistant rubber, natural Para rubber, silicone and, on demand, special compounds.
The micro-holes of suction plates are self-cleaning; dusts and dirtiness crossing them cannot deposit on their walls, thus keeping the suction section unchanged. The dusts unavoidably sucked through the micro-holes are captured by a filtering disk consisting of a stainless steel net, positioned inside the base box of the system, easily inspected for cleaning operations. The impalpable dusts, which the filtering disk cannot retain, are sucked and ejected by the vacuum generator. Shut-off valves can be easily dismounted and inspected, to allow their fast cleaning, in case of need, also by not specialized personnel. Depending on the gripping system size, it is possible to choose the number of vacuum generators. If we want to opt for an alternative vacuum source, we can equip the system with a closing plate with distributor, provided with suction connections and control instruments. The base boxes of Octopus systems are equipped with supplementary connections for control instruments and for the compressed air counterblow, to allow a faster deposition of the lifted load.

The suction plates, with the same sizes, are interchangeable on all gripping systems; it is in fact possible to replace a suction plate with micro-holes coated by foam rubber with a plate with vacuum cups or shut-off valves.
Gripping systems can pick on horizontal, vertical, inclined or upside-down surfaces. Accessories and spare parts are available for all gripping systems.
And last but not least …
Among novelties, Vuototecnica presented new gripping hands, implemented with 3D printer for single pieces; a novelty that really allows a product customization unconceivable in the past.
Thanks to this solution, customers’ handling requirements are faced case by case, with specifically tailored gripping hands to suit the shape of the item to be gripped, up to wrapping and holding it.
Gripping hands are made of ABS and therefore they are simultaneously resistant and ultra-light, ideal then for delta or flexible picker robot typologies, for which the lightness-handling speed pair is essential.



{kind=link}