
A unique robotic system in the world, implemented by the Italian Institute of Technology and Camozzi Group, contributes in the work safety, testing with cameras and sensors the integrity of the structure, so that collected data allow preventive maintenance interventions, too.

San Giorgio Bridge in Genoa, built in record times after the tragedy in August 2018 on Polcevera viaduct, will be equipped with a robotic system unique in the world, devised to share in the monitoring and maintenance of the new work. Devices, designed by the Italian Institute of Technology (IIT), implemented by Camozzi Group and commissioned by the consortium composed by Seastema spa and Cetena Spa (Fincantieri Group), are protagonists of the testing phases, preparatory to commissioning, precisely in these weeks. With their camera and sensor systems, the 4 robots, 2 Robot-Inspection and 2 Robot-Wash, will contribute in the safety of the structure designed by Renzo Piano. The machines, installed on the bridge sides, will have respectively the task of inspecting the lower surface of the deck, by processing data to highlight eventual anomalies, and of cleaning wind barriers and solar panels, assuring their correct operation in time. The system, which will work on a site where the eyes of the world will be unavoidably focused, is nowadays a unique case for its capability of providing inspections of this level automatically, representing a repeatable model not only on this type of infrastructures but also on all civil works that need so advanced controls.
High automation level
The project originates from an architectural proposal by Renzo Piano Building Workshop studio, which in 2018 the Italian Institute of technology transposed and widened, thinking of a robotic system unique of its kind, afterwards developed on industrial scale by Camozzi. The collaboration between IIT and Brescia multinational dates back to June 2017, with the establishment of a Joint Lab mainly focused on new materials and advanced robotics: the implementation of robots for the bridge is the tangible fruit of the progresses of this collaboration. The system combines the strong points of the automation of forefront mechatronics mechanisms, ambit where Camozzi boasts notable expertise (in particular coupled with industrial automation) with the autonomy of cognitive systems. The inspection system exploits in fact the fully autonomous “cognitive mechatronics” that, through four robots, will operate in addition to the control and maintenance activities already provided for by law. Moreover, due to its hardware and software versatility, in the future it will be possible to implement the system with new technologies, to be always in the forefront.
A committing challenge
«Camozzi Group – states Luca Molinari, engineer and project manager for Brescia multinational – has lavished its whole know-how to accept a very committing challenge, working on the IIT idea in full compliance with the commissioner’s requests that imagined a bridge expected to be not only in the architectural forefront, but also equipped with devices able to replace man for periodical inspection and cleaning activities. Technical difficulties have imposed the adoption of innovative solutions, starting from the need of sliding on rails placed on the outside of the deck, leaving the lower part completely free. To succeed in moving the optical groups installed on robots for their work execution, therefore they needed bent beams able to copy the deck geometry and to operate in cantilever modality; besides, they had to be stiff and light, with low resistance to wind, too. Last but not least, the aesthetical aspect. The solution consisted in making these curved beams in carbon fibre and, to do that, Camozzi Group transferred its decennial competence and expertise gained in applications for the aeronautical and aerospace sectors».

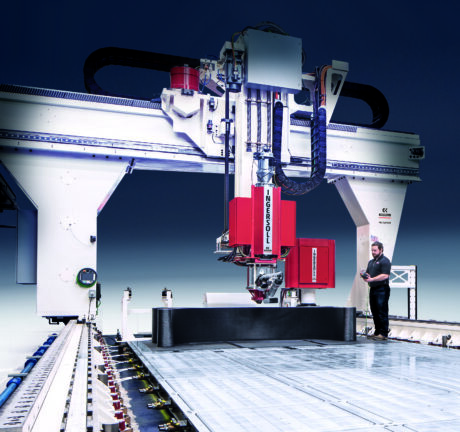
Record 3D printing
Therefore, beams in particular were manufactured as single carbon fibre parts, exploiting technologies generally used in the aerospace and aeronautical industry, made by means of moulds in 3d and using the technology of Masterprint machine, implemented by Camozzi Group and defined as the biggest 3d printer in the world. Robots will slide on the outer rails of the Bridge where they will allow assessing the integrity state of the infrastructure by sending the acquired images and data to a control centre, so implementing a digital database that, through efficacious analysis and prediction algorithms, will enable the manager to intervene with eventual preventive maintenance actions.
Robots are controlled by the control room through wi-fi net and powered by batteries: recharge stations have been prearranged on the bridge’s sides, positioned every 200 metres. The two robots run along the bridge edge by means of tracks and drive wheels, for the whole viaduct length (about 1100 metres), with regularity and according to the various atmospheric conditions.
Robot-Inspection
The two robots of this typology respectively weigh 2.2 tons, they are over 7-metre large and equipped with 82 wheels for the motion of the two axes. They are provided with a retractable arm entrusted with the inspection task, consisting of a fixed and a mobile part, both of carbon fibre, performing 17-metre extension to reach the bridge edge at the centre of the deck. The robot arm is the real protagonist of inspective activities: the external deck monitoring is precisely carried out by the arm, able to slide along the entire bridge length, to retract close to piers and to operate high-resolution cameras and measuring sensors of surface conditions, which analyse the deterioration of paints, eventual corrosion signs and the state of welds. Therefore, computational models allow a punctual check of collected data and the warning about eventual anomalies.
Robot-Wash
The robot of this typology weighs about 2 tons and it is equipped with 56 wheels to distribute the load on the bridge edge. 3.5-metre high, almost 8- metre long, it is subdivided into two parts, one for cleaning and one for the recharge. The robot can remove dusts and detritus from the photovoltaic plant and from glass wind barriers that delimit the lanes, maintaining the efficiency and the functionality of the bridge. In design phase, the focus was also on sustainability, in particular concerning the use of water. The water used for the structure washing, in fact, comes from rains and from other condensate water collected by the infrastructure itself. In case of water shortage caused by dry periods, or with scarce humidity levels, the robot activates a blowing device for the particulate elimination, waiting for the recovery of the due levels of rainwater availability for a more complete washing. This robot as well is provided with sensors that keep under control the transparency levels of glasses and the water quantity on surfaces. Two parameters that, constantly monitored, enable the robot to determine when it should intervene by cleaning the surfaces.



{kind=link}